

校準渦輪流量計動態響應特性的理論和實施方法
摘要:渦輪流量計傳統上只進行穩態校準 , 即只校準其 (穩態 ) 儀表系數。本文闡述了校準渦輪流量計動態響應特性的理論和實施方法。
在武器裝備的研制和使用過程中 , 經常遇到非穩態燃油流量問題。 流量是指在穩態或平均流量上疊加有周期或隨機的脈動 , 有時還有階躍形式的擾動。以前傳統的做法只對流量計進行穩態校準 , 用這些流量計進行非穩態流量測量時又不進行合理的修正。 其結果必然引入一定的、 甚至很大的誤差。 要解決這一問題 ,必須建立一專門裝置 , 對流量計的動態特性進行校準亦即動態建模 , 從而為動態測量提供可靠的溯源依據。我國原來在這方面的研究幾乎是空白。
我們研制了 “燃油動態流量標準” , 用以解決燃油渦輪流量計動態特性的校準問題。 渦輪流量計的轉子(渦輪 ) 輕 , 慣性小 , 較適于進行動態測量 , 在我國航空發動機試車臺等場合幾乎無一例外地使用它。
1、渦輪流量計的數字模型動態特性校準:
實際上是個動態建模問題。 它的步應當是選擇一個合適的數學模型。美國人 J. Grey于 1956年即建立了渦輪流量計的動態模型 [1] , 經變形后模型形式簡潔 , 物理意義清晰、 被我們選為動態校準的基礎。
在忽略流體的粘度和流量計靜摩擦力等影響后 ,可將 Grey模型變形為以下動態方程k2k 3d Ak2 – k K=Ak 1k3K 其中 k= d AV 為質量流; K為渦輪轉頻; k1(量綱為 cm /g )、 k2(無量綱 ) 和 k3(量綱為 cm ) 是與流量計結構有關的常數。如以體積流 Q= k/d代入 ( 1) , 并定義 Ks= k 2 /( k3 A ) , Kd = A / ( k1k 3d) , ( 1) 式就變為Ks Q2- QK= KdK 。
式 ( 2) 表明 , 渦輪流量計是個一階非線性系統 , 這符合大量的實驗結果和人們對它的一般認識。 如將流量計置于穩態流量中進行校準 , 有 K = 0 , Ks = K /Q=( N /t ) / (V /t ) = N /V , N 為流量計脈沖數 , 我們稱 Ks(量綱為脈沖數 /L ) 為流量計的靜態儀表系數 , 它和“速度式流量變送器檢定規程 JJG198-94” 中定義的儀表系數 K 具有完全相同的量綱和物理意義 ,即: 單位體積校準介質流過流量計時 , 流量計所發出的電脈沖數。如果將流量計置于非穩態流中進行校準 ,K ≠ 0。在一定條件下由激勵Q ( t ) 和響應 K ( t ) 可以解析地求出( 2 ) 式中另一個系數 Kd(量綱為 L) 來。
我們將 Kd定義為流量計的動態儀表系數。它是動態校準的對象。它的物理意義如下: 用處于流量計額定量程內的某一穩態流量去激勵原本靜止的渦輪葉片 , 則當 Kd L流體流經流量計后 , 流量計將完成從靜止到***終穩態響應這一過渡過程的 63. 2% (相應線性系統時間常數概念 )。從這一意義上講 , Kd也是流量計在特定介質中的轉動慣量的度量。在流量計額定流量范圍內 , 一個流量計的靜態系數近似地是常數 , 動態系數近似地也是常數 , 它們與具體的流量值無關。穩態校準的目的是校準 Ks, 動態校準的目的是校準K d , 一旦確定了這兩個系數 , 也就確定了流量計完整的穩態和動態特性。
2、動態校準的硬件:
如上節所述 , 要想校準渦輪流量計的動態儀表系數 Kd, 基本方法是用非穩態流去激勵流量計 , 然后從其動態響應中抽取有關信息。 由于渦輪流量計是非線性系統 , 必須將式 ( 2) 在一定條件下線性化。
讓流量在極短時間內從零上升至穩定值 Q, 式( 2) 中的 Q 就可當作常數處理 , 式 ( 2 ) 也從形式上演變為線性方程 , 其解為K= KsQ ( 1 – e- t /f) ( 3 )其中 f= Kd/Q 可理解為流量計對應于階躍激勵 Q 的“時間常數”。從圖 1可見 , f不是常數 , 而只有 Kd= f Q是常數。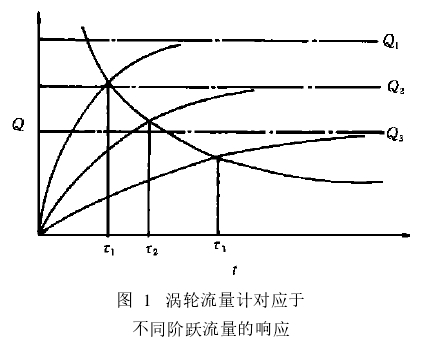

圖 1 渦輪流量計對應于不同階躍流量的響應
如果獲得圖 1中一族響應曲線 , 就可獲得 Kd的估計。由于渦輪流量計轉子很輕、 慣性很小 , f值很小 , 一般僅為數十毫秒。 這就要求階躍激勵自身的上升時間應為毫秒量級 , 即應在毫秒量級時間間隔內讓流體克服慣性、 阻尼、 摩擦 , 迅速完成從靜止到加速到穩定的過程 , 這是極為困難的。如果考慮到流體在加速時有壓縮、 振蕩等情況 , 就知產生理想的階躍事實上沒有可能。 國外許多實驗室在作流量計動態校準時未獲成功 ,原因也在此。 為此 , 我們設計了一電磁控制的頂針機構 , 用一直徑很小但剛性很大的頂針插入或抽離渦輪葉片空檔 , 用以控制渦輪葉片可以或不可以轉動。
流量源采用伺服電機驅動計量油缸活塞 , 詳見圖2。由 PLC 控制各閥門狀態切換 ,使穩態校準段關閉、 動態校準段開啟。油流由活塞驅動從油缸左側出來 , 流經流量計后回到油缸另一側 , 由于開始時頂針處于插入狀態 , 渦輪葉片雖受油流推動卻被頂針擋住而無法轉動 , 因而也沒有任何脈沖輸出。待油流量穩定后 , 按下操作臺上的電控按鈕 , 電磁鐵吸合 , 頂針抽出 , 渦輪葉片突然處于自由狀態 , 開始進入響應于設定油流量 Q的起動過渡過程 , 即渦輪轉頻由慢到快***后達到穩定的過程。 計算機的動態校準程序控制數字存儲示波器完成這一過渡過程信號的采集、 傳輸、 及數據文件的存儲。然后由相應軟件計算出該過程的時間常數 f及穩態流量值 Q, 從而得到相應的動態系數 Kd= f Q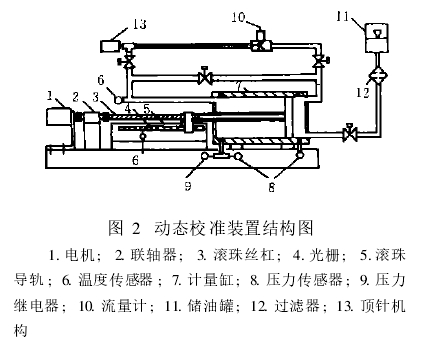
圖 2 動態校準裝置結構圖 1. 電機 ; 2. 聯軸器 ; 3. 滾珠絲杠 ; 4. 光柵 ; 5. 滾珠導軌 ; 6. 溫度傳感器 ; 7. 計量缸 ; 8. 壓力傳感器 ; 9. 壓力繼電器 ; 10. 流量計 ; 11. 儲油罐 ; 12. 過濾器 ; 13. 頂針機構
不改變流量設定值 Q重復進行校準 , 可以得到相應這量值的多個動態儀表系數及其平均值、 重復性指標 (相對實驗標準偏差 )。 順序改變電機轉速 , 使流量計在其額定量程及安全范圍內 (過大的階躍流量可能損壞被校流量計的轉動部分 ) 多個流量點重復上述校準 , 就可獲得流量計全量程的平均動態儀表系數、線性度和重復性等指標。 由于頂針起不起阻擋作用僅取決于針尖是否離開渦輪葉片的邊緣那一瞬間 , 所以盡管電磁鐵吸合動作為十毫秒量級 , 但仿真出來的階躍 “上升沿” 卻是極其陡峭的 , 遠小于毫秒量級。為使響應過渡過程易于觀察及處理 , 我們使用了流量計的正弦輸出信號而不是一般穩態校準時的方波信號。
3、動態校準的軟件:
動態校準軟件是鼠標操作的W IN DOW S應用程序。軟件的核心有兩點 , 一是控制數字存儲示波器 , 以完成動態信號采集 , 另一點是對采集到的動態信號進行處理 , 抽取時間常數 f。 操作員通過屏幕對話框選定信號通道號、 采集點數、 采樣間隔、 信號幅度、 預觸發時間、 觸發電平等參數 , 通過 IEEE488接口設置數字存儲示波器并使其處于待觸發狀態。待階躍流激勵流量計生成過渡過程信號后 , 數字存儲示波器被觸發并存下該信號。由于信號長度一般設置為 1 32 k B, 而采樣間隔一般為 20μs左右 ,所以采集到的信號長達 2. 6 s左右 ,這樣長的時間間隔中動態信號早已完成其過渡過程并進入穩態。 通過屏幕對話框操作可將該信號傳輸到計算機內存 , 或作為數據文件存盤。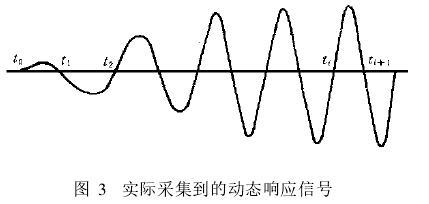
圖 3 實際采集到的動態響應信號
采集到的典型動態響應信號參見圖 3。從中可以發現其幅值及頻率均有指數上升變化的規律。 經理論分析及仿真擬合后確認 , 可用下列公式表示這一過程:Y (t ) = A0 ( 1 – e- t /f1 ) ( 1 – e- t /f2 )sin [2cf0( 1 – e- t /f) t + θ0]
式中: A0、f 0為進入穩態后的幅值和頻率 ;θ0為初相角 ,它與流量計起動時渦輪葉片與磁檢出頭的相對位置有關; f是頻率變化過程的時間常數 , f1、 f2為幅值變化過程的時間常數。由于某種力學和電學原因 , 幅值上升過程體現為一個二階過程 , 而頻率變化如式 ( 4) 所示為一階過程。 數據處理的任務歸結為從實際響應曲線中提取頻率變化的時間常數 f。
式 ( 4) 表明 , 動態響應是個多參數過程 , 而且對有些參數如 f是非線性的。這使我們無法使用一般的參數估計方法。由于幅值變化實際上無用 , 有用的僅僅是頻率變化過程 , 經適當變換和分析 , 我們獲得了在***小二乘意義下 f值的***佳估計。一旦獲得了 f, 再測定 Q, 就可獲得相應的 Kd。
4、動態校準裝置的不確定度分析:
從物理機制上看 , 影響流量計動態特性的因素要比影響流量計穩態特性的因素多而復雜。 因為后者是在力平衡條件下的勻速過程 , 而前者是在力不平衡條件下的變速過程。一般來說 , 流量計動態特性指標要比穩態特性指標差很多。基于這種考慮 , 下面有關的不確定度分析將忽略一些次要因素如溫度壓力修正、 數字存儲示波器時基精度、 A/D轉換器精度等 ,而只就主要因素作必要的分析。
動態校準的基本方程為 Kd= f Q, 其中 Kd、 f、 Q均為隨機變量 , 進行方差分析可得u2c(Kd) = Q2u2(f) + f2u2( Q ) + 2Qfu ( Q ,f)由于Q、 f不相關 , 有( uc( Kd) /Kd)2= (u (f) /f)2+ (u ( Q ) /Q )2( 5
上式右側項為時間常數測定的相對不確定度 , 第二項為流量測量的相對不確定度。 流量 Q的測量可以采用多種方法 , 本課題采用定時測容積法 , 即 Q= V /t。由專用計數板上的時鐘測定時間 , 由光柵測定在此期間計量缸的排量 , 于是有
u ( Q ) /Q )2= ( u ( V ) /V )2+ ( u ( t ) /t )2( 6 )式中右側項分量已經計量院容量室校準為不超過0. 01% ; 第二項分量取決于計數板的計時精度。 計數板晶振頻率為 7. 159 M Hz, 經分頻后其時間分辯力為1 m s, 由于總計時時間一般定為 1~ 2 s左右 , 可確保計時準確度達 0. 1% 左右。 于是有
u( Q ) /Q ≈ 0. 1% 至于時間常數 f的查找誤差 , 由于其復雜性 (參見節 3) , 很難作出純理論的分析。為此 , 進行了大量的仿真計算。有充分理由相信 , 對真實信號時間常數的估計的相對不確定度不會明顯變差。 現取 (按均勻分布 )u (f) /f= 0. 5% ***后有 uc( Kd) /Kd≈ 0. 5% 由于V、t及 f的分布均近似于均勻分布 , 且其相對不確定度相差不大 , 所以在計算 Kd的相對擴展不確定度時 , 以高斯分布處理。取包含因子 k= 2, 置信水平為 95% , 有
U ( Kd) /Kd= 1. 0%實際校準表明 , 不少渦輪流量計的動態儀表系數Kd可獲得近 2% 左右的數據重復性 , 而這里已含有裝置重復性和流量計自身的動態重復性兩項。